联系我们
联系我们



安装并激活RobotStudio 建立一个工作站,命名为“###”,保存在D盘“test1”的文件夹里面。导入IRB2600型号工业机器人,并简述IRB2600型号工业机器人具体规格参数。同时通过Frehand工具手动操作机器人。
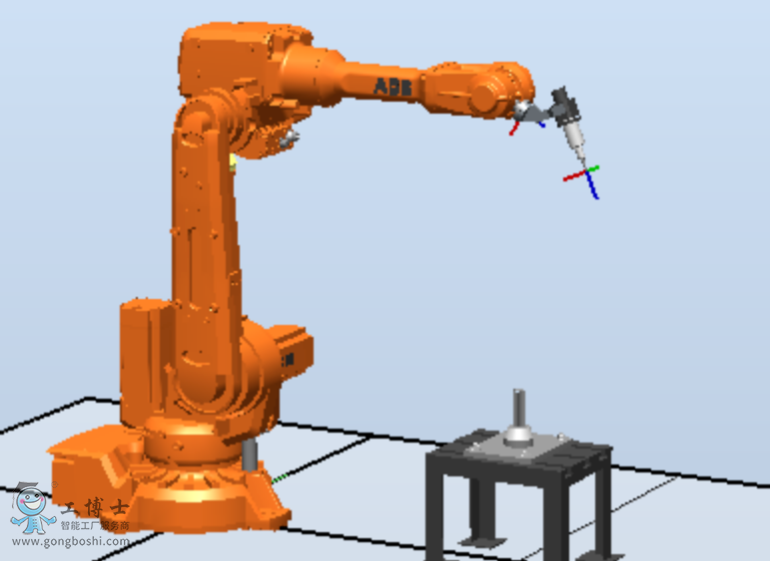
基本的工业机器人工作站包含工业机器人及工作对象。我们就通过图中的例子进行工业机器人工作站布局的学习。
导入机器人

在“文件”功能选项卡中,选择“新建”,单击“创建”,创建一个新的空工作站。

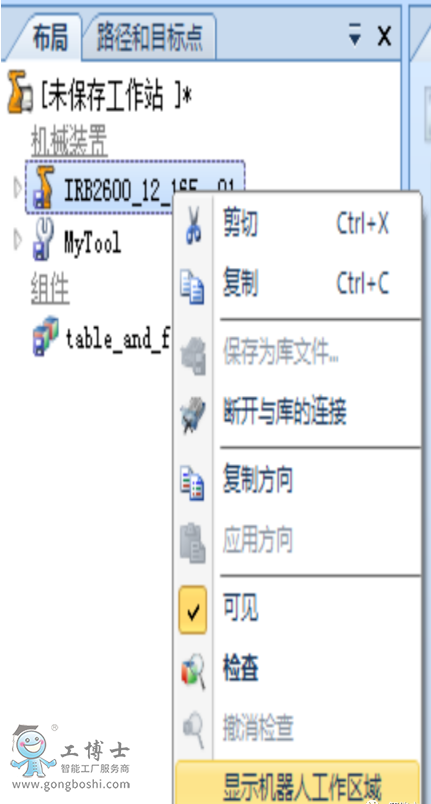
在“基本”功能选项卡中,打开“ABB模型库”,选择“IRB2600”
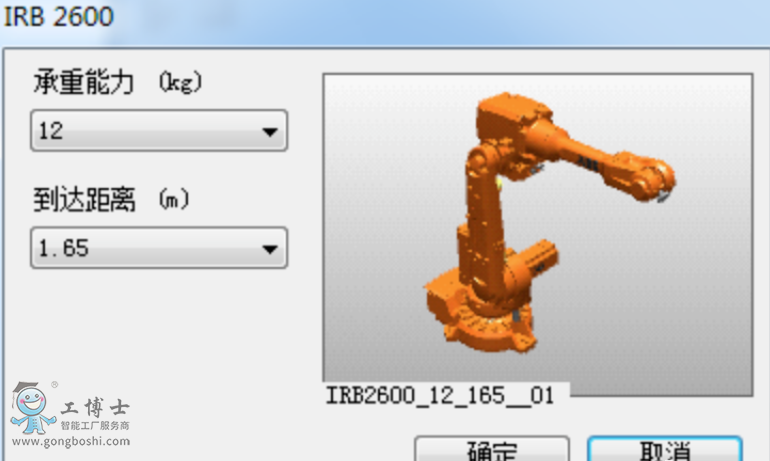
设定好数值,单击“确定”(在实际中,要根据项目的要求选定具体的机器人型号、承重能力及到达距离)
使用键盘与鼠标的按键组合,调整工作站视图。
平移:Ctrl+鼠标左键。
视角:Ctrl+Shift+鼠标左键。
缩放:滚动鼠标中间滚轮
机器人的工具

在“基本”功能选项卡中,打开“导入模型库”—“设备”,选择“myTool”
在“MyTool”上按住左键,向上拖动到“IRB2600_12_165_01”后松开左键
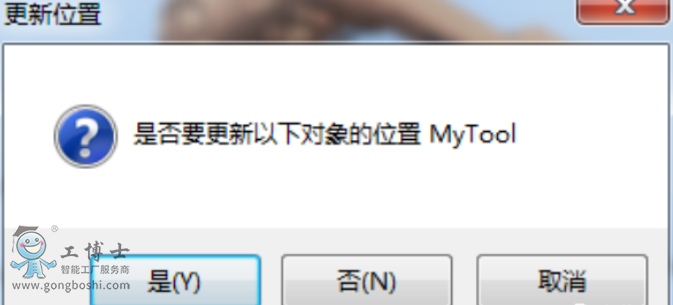
单击“Yes”
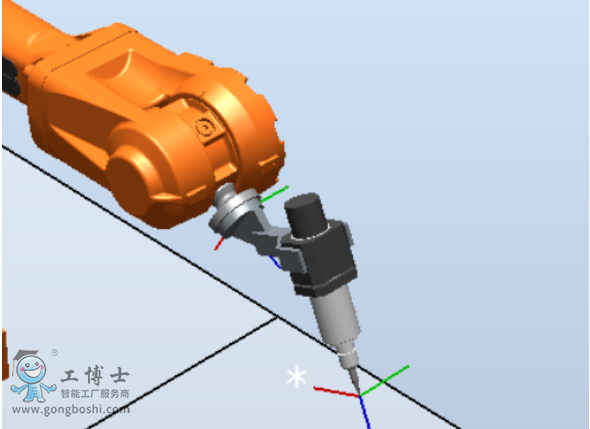
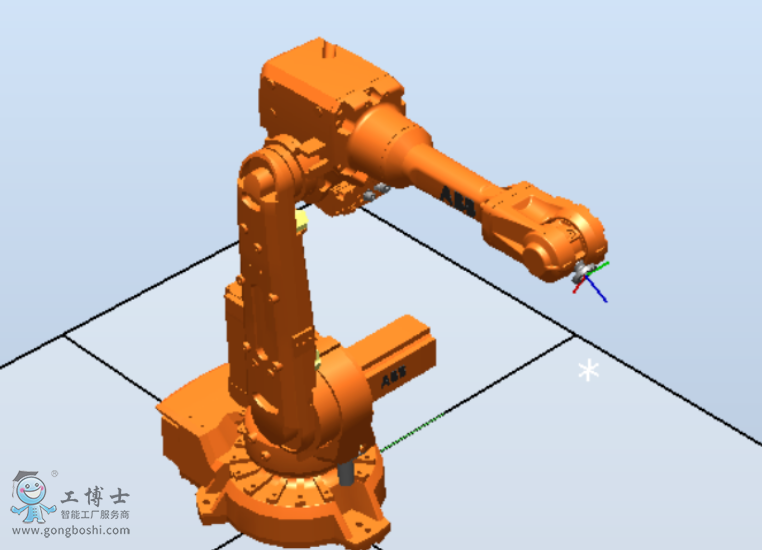
工具已经安装到机器人法兰盘了
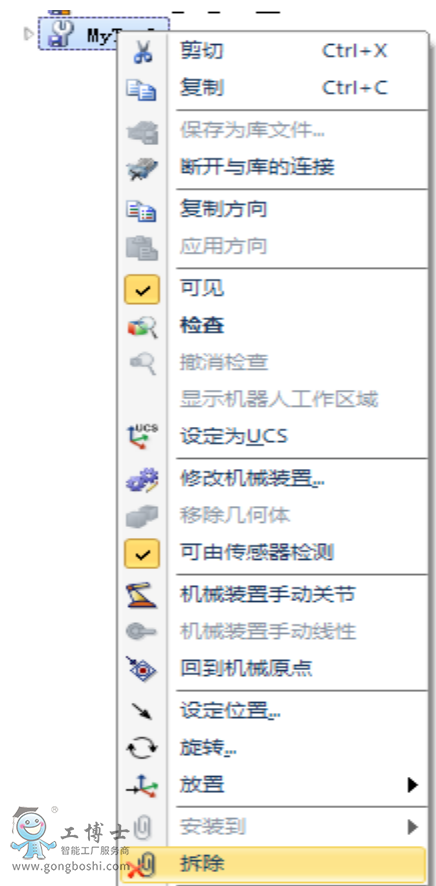
如果想将工具从机器人法兰盘上拆下,则可以在“MyTool”上单击右键,选择“拆除”
摆放周边的模型
摆放周边的模型
在“基本”功能选项卡中,在“导入模型库”下拉“设备”列表中选择“propeller table”模型进行导入