联系我们
联系我们



「撰写Robot程序」可达到此目的。
Robot程序主要由「动作指令」构成,只要熟悉手动操作Robot的方式,将Robot移动到欲
记绿的位置,即可在「教点」的同时完成动作指令与Robot程序。
这—次将介绍如何撰写简单的Robot程序。
一、建立新程序(CREATE)
与许多计算机软件—样,首先需要「开新档案」,建立一个新的Robot程序。
按下SELECT
进入Robot程序选择—览表。

此时F2功能应显示为CREATE,若不是,请按NEXT
切F1~F5的功能键至下—列,即可出现CREATE。
上图画面中,F5的右方有「>」符号,代表F1~F5功能键有其他功能可供换。按下F2CREATE以建立一个新的Robot程序,此时显示以下画面等待输入程序名称:

程序名称有以下限制:
1.不可与其他已存在的程序名称相同。
2.由英文大写字母、敷字、_(底线)组成。
3.共1~8个字符。
4.第1个字必须是英文字母。
5.中间不可有空格。
请先将教示盘的开关切换到ON的位置,程序名称输入完成请按两次,进入程序编辑画面
出现此画面代表新程序建立完成。

二、点位教导(Teaching)
此时F1功能应显示为POINT,若不是,请按NEXT切换F1~F5的功能键至下—列,即可出POINT。
切换到手动模式,将Robot手动移动到需求的位置。按下F1 POINT,将出现4个选项。

虽然这些选项各有其不同意义,但目前请任意选其中一个,例如选 1



此程序会使Robot 执行如下的动作,从Robot现在位置移动到第1个记绿位置,然后移动到第
2个记绿位置,再移动到第3个记绿位置。
三、手动测试
我们可以在撰写Robot程序的过程中,随时手动测试此程序。(不一定要整个程序完成后才测
试)基于安全的考量,建议测试时将Robot总速度Override 放慢,或切换到T1慢速教导模
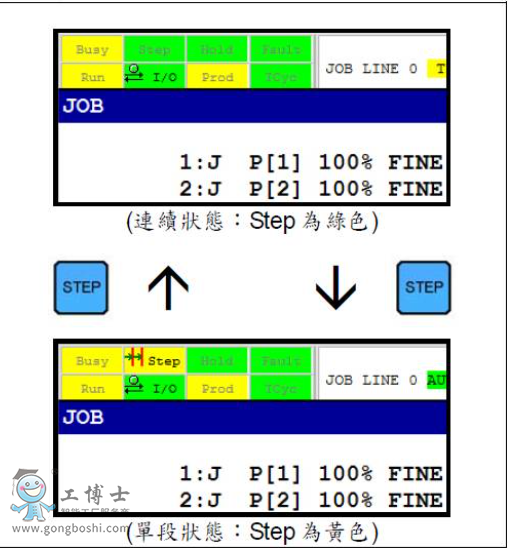
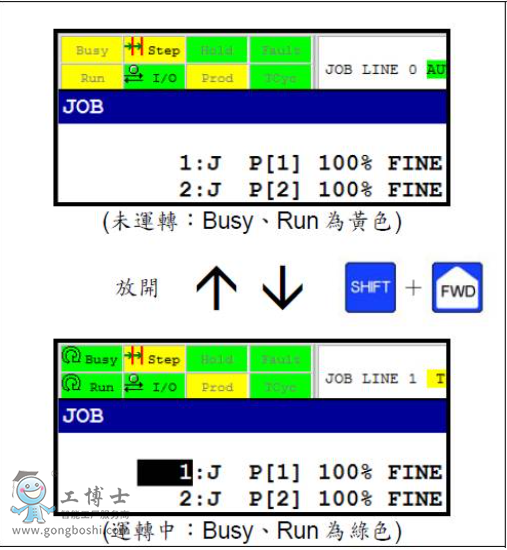
式。测试时请先进行STEP单段状态测试,按下
键可切换状态: